

製品ナビ×EtherCAT特集
2020年6月15日 UPDATE

EtherCATのトラブルシュート
~診断機能と基本的な手順~
EtherCAT Technology Group 日本オフィス
Representative/Technologist 小幡正規
Representative/Technologist 小幡正規
はじめに
1Gb/10GbイーサネットベースのEtherCAT Gの仕様化作業や半導体製造装置向けデバイスプロファイルのコンフォーマンステストなどの新しい取り組みは順調に行われているところですが、今回はEtherCATを活用いただくため診断機能について解説してみました。 EtherCATは導入時にノードアドレスやマネージドスイッチなどの煩雑な設定を行わなくても、電源とネットワークケーブルを正し く接続するだけで簡単に動作できるようになっています。しかしながらメンテナンス時の誤配線やスレーブの入れ替わり、ノイズや 断線などによる通信の障害、さらにスレーブや電源の故障を検出する診断機能は可用性を向上させるためにフィールドバスとして 極めて重要な機能です。ここでは障害発生箇所や原因を特定するためにEtherCATが備えている機能とその使い方の基本事項を 解説するとともに、EtherCAT Technology Groupが新しく策定した診断用インタフェースを紹介します。
障害の種類

EtherCATネットワークで発生しうる障害は2種類に分類できます。 1つはハードウェア障害であり、通信経路やスレーブが機能しない状態になり、通信フレームが破損したりネットワークの一部に通信が到達しない状態です。2つめはソフトウェア障害であり、主に設定のミスによりスレーブが運転状態に移行できない状態です。これらの診断は非周期的ですが、EtherCATは周期通信でも診断を行っています(図1)。
周期データ診断
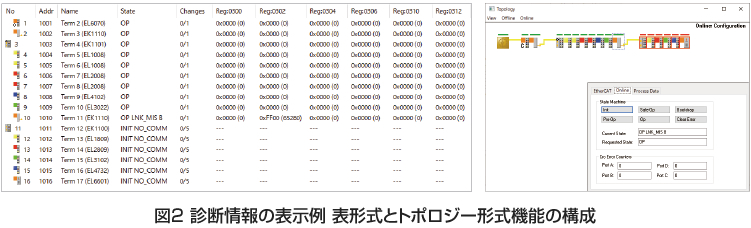
EtherCAT通信ではフレームが全てのスレーブを通過、つまり1つのフレームを全てのスレーブがアクセスします。フレームは複数 のデータグラムからなり、データグラムはコマンド(リードやライト)、アドレス指定、通信データからなります。プロセスデータの周期 通信の通信データは複数のスレーブのプロセスデータからなるメモリブロックです。データグラムの最後には処理を行ったスレー ブがインクリメントするワーキングカウンター(WKC)があり、マスターはWKCの予定値と戻り値を比較します。不一致の場合、ネッ トワーク内で通信ができない状態のスレーブがあることになります。スレーブにはAL Statusレジスタでスレーブの動作状態を通 知でき、ブロードキャストリードでこの論理和(OR)を取得することでネットワーク内の運転状態(OP)から逸脱したりエラーが発生し ているスレーブの検出、全スレーブ数をマスターは周期通信で把握できます。このようなスレーブの存在を検知したマスターは障 害が発生したスレーブを非周期コマンドで診断情報を取得して検出し、障害発生箇所を特定します。
ハードウェア診断
〈エラーカウンター〉
スレーブの通信チップ(ESC)には通信エラー発生回数のカウンターがあり、ツールや制御プログラムから参照できます。また、マスターがフレームの破損またはロストが発生したことを検出したときはロストフレームカウンターの値を通知します。このカウンターがインクリメントされるときに、ESCのエラーカウンターをチェックして障害発生箇所を特定できます。 ESCは通信ポートごとに以下のエラーカウンターをサポートしています。
■ロストリンクカウンター:イーサネットの物理層リンクが途切れたときにインクリメント
■RXエラーカウンター:イーサネット通信のシンボルの破損検出時にインクリメント
■CRCエラーカウンター:最初にFCSの不一致を検出したポートでインクリメント
ロストリンクやRXエラーはスレーブ間の局所的なエラーのため、インクリメントされるポート間が障害発生箇所です。RXエラーは フレームが流れていないときもアイドルシンボルを交換しているため常時検出されます。シンボルの破損がフレーム内で発生する とCRCエラーになります。CRCエラーは後続のスレーブも検出しますが、CRCエラーカウンターをインクリメントするのは最初の スレーブだけであり破損箇所の特定が可能です。

〈Link/Actインジケーター〉
EtherCATの通信ポートにはLink/Actインジケーターがあり、イーサネット物理層のリンク状態と通信状態を目視できます。緑の点灯状態がリンク確立・通信なしです。通信状態の場合はフレームの通過状況で点滅します。消灯している場合はリンクが確立していないことになり、ケーブルの断線、コネクタ接触不良やケーブル両端のいずれかのスレーブの異常の可能性があります。
ソフトウェア診断
EtherCATスレーブは電源ONのINIT状態からマスターによって必要な設定がされ最終的にOPという正常な運転状態に移行します(図3)。この状態遷移のしくみをEtherCATステートマシンといいます。表2にスレーブの状態とRUNインジケータの関係を示します。
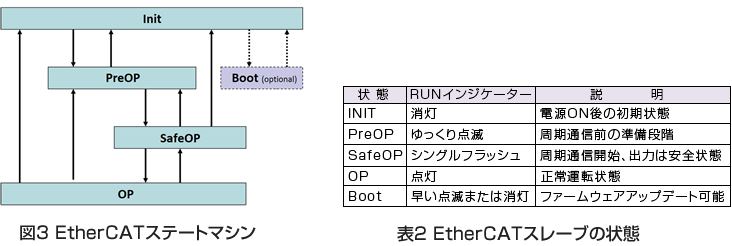
ソフトウェアレベルのエラーはEtherCATスレーブの状態遷移をともないます。マスターがリクエストした状態にスレーブが移行できない、または障害で状態を維持できないときスレーブはエラーを表示し、AL Status Codeというエラーコードをマスターに通知します。エラーはERRインジケーターの点灯状態によっても確認できます。表3に主な点灯状態と意味を示します。

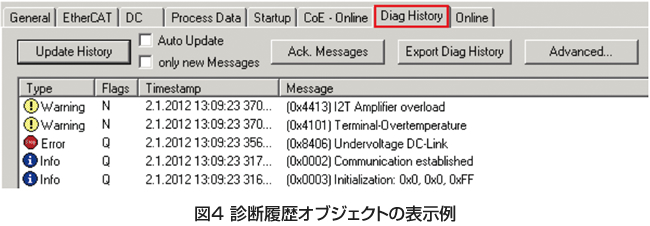
マスターはエラーが通知されるとGUI画面や動作ログなどにエラーの発生したスレーブ情報とAL Status Codeを表示します。初期化エラーはマスターによるスレーブの設定内容に矛盾があるときに発生し、システム構築時に発生します。出力または入力プロセスデータの無効な設定時に通知される0x001Dまたは0x001EなどのAL Status Codeがあります。ランタイムエラーには同期エラー(0x001A)など運転中の障害です。詳しくはスレーブのドキュメントを参照してください。 アプリケーション固有のエラーは、CoEオブジェクトディクショナリーの0x10F3 Diagnosis History(診断履歴)オブジェクトで参照で きます(オプション機能)。図4に表示例を示します。
マスター非依存診断インタフェース
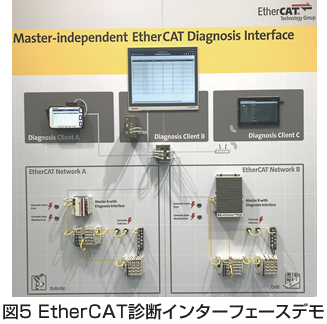 これらの診断機能はEtherCATが標準的に備えているものですが、使用するマスターやツールにより診断情報を参照するための画面や手順が異なりま す。異なるマスターが混在した環境の診断性の向上のため、マスターメーカーに依存しない診断インタフェース機能を仕様化しました。共通の診断クライア ントで様々なマスター下のEtherCATネットワークの動作状況を診断できます。スレーブ側の変更はなく、従来からあったマスター内のパラメーター一覧 (マスターオブジェクトディクショナリー)と通信機能(メールボックスゲートウェイ)を組み合わせ、スレーブの診断情報を保持するエリア構成を新しく定義しています。つまり、既存のマスターでも簡単に少ないリソースで機能追加ができるようになっているので、ソフトウェアアップデートによる対応が可能です。EtherCAT Technology Groupはマスターにこの診断インタフェースの実装を推奨しています。EtherCATネットワーク構築の際にはこの機能に対 応もしくは対応予定のマスターの選定をおすすめします。
これらの診断機能はEtherCATが標準的に備えているものですが、使用するマスターやツールにより診断情報を参照するための画面や手順が異なりま す。異なるマスターが混在した環境の診断性の向上のため、マスターメーカーに依存しない診断インタフェース機能を仕様化しました。共通の診断クライア ントで様々なマスター下のEtherCATネットワークの動作状況を診断できます。スレーブ側の変更はなく、従来からあったマスター内のパラメーター一覧 (マスターオブジェクトディクショナリー)と通信機能(メールボックスゲートウェイ)を組み合わせ、スレーブの診断情報を保持するエリア構成を新しく定義しています。つまり、既存のマスターでも簡単に少ないリソースで機能追加ができるようになっているので、ソフトウェアアップデートによる対応が可能です。EtherCAT Technology Groupはマスターにこの診断インタフェースの実装を推奨しています。EtherCATネットワーク構築の際にはこの機能に対 応もしくは対応予定のマスターの選定をおすすめします。
終わりに
 診断方法の概要を解説しましたが、詳しい技術資料「ユーザー向けEtherCAT診断」をウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「診断」を入力してください。関連する資料としてEtherCATネットワークの敷設に関するガイドラインもあります。[テキスト検索]で「敷設」を入力してください。
診断方法の概要を解説しましたが、詳しい技術資料「ユーザー向けEtherCAT診断」をウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「診断」を入力してください。関連する資料としてEtherCATネットワークの敷設に関するガイドラインもあります。[テキスト検索]で「敷設」を入力してください。
お知らせ
コロナウィルス感染拡大の影響のため、今年度のイベントスケジュールの見直しを行っています。新しいイベント情報は随時ETGウェブサイトや、登録者には案内メールにてお知らせさせていただきます。
https://www.ethercat.org/jp/events_2020.htm
ETGウェブサイトではEtherCATの基本技術や特徴をわかりやすく解説したマルチメディアコンテンツを新しく公開しました。日本語字幕版も用意しましたのでぜひご覧ください。トップページのETGニュースからアクセスできます。
EtherCAT Technology Group (ETG)について
ETGはEtherCATの技術仕様の管理と拡張、セミナーや展示会などのプロモーションを行っています。2020年4月24日現在、ワールドワイドのメンバー数は5790社からなる世界最大のフィールドバス団体です。日本国内では670社が参加しています。
問い合わせ先
EtherCAT Technology Group日本オフィス
〒231-0062 神奈川県横浜市中区桜木町1-1-8 日石横浜ビル18F
TEL : 045-650-1610
FAX : 045-650-1613
お問い合わせ : info.jp@ethercat.org
技術サポート : support.jp@ethercat.org
ウェブサイト : www.ethercat.org/jp.htm
EtherCATメンバーリンク:https://www.ethercat.org/jp/members.php

- EtherCAT ネットワークモーションのご紹介
- パナソニック株式会社
- 1ユニットで最大64軸のモーションコントロールを実現しました。...

- 超高速オープンフィールドバス 製品カタログ
- ベッコフオートメーション(株)
- 超高速オープンフィールドバスであるEtherCAT ターミナル「EK/ELシリーズ」の製品カタログ。導入実績、システム概要、特長と併せ、ターミナル選定における基本事項...

- EtherCAT対応製品のご紹介
- ヒルシャー・ジャパン(株)
- EtherCAT 通信に必要なハードウェア、ソフトウェアをワンモジュールに実装した完全実行型インターフェース。短期間・低コスト、且つハイパフォーマンスでEtherCATマスタおよびスレーブを実現できます。...

- EtherCAT対応製品のご紹介
- CKD(株)
- 方向制御弁、ダイレクトドライブモータ、電動アクチュエータなど...



