

製品ナビ×EtherCAT特集
2021年1月20日 UPDATE

EtherCATネットワークを構築/運用するために
~設定のヒントとセキュリティ~
EtherCAT Technology Group 日本オフィス
Representative/Technologist 小幡正規
Representative/Technologist 小幡正規
はじめに
EtherCAT Technology Group(ETG)の設立17年でワールドワイドのメンバー数が6000を超え、日本でもまもなく700社に なろうとしています。COVID-19によりセミナーや展示会など、皆さんに直接お会いすることが難しい状況が続いていますが、ETGでは、本稿のような情報誌やオンラインイベントの開催で情報提供を強化しています。オンラインセミナーの利点として、遠方の地域の方々も気軽に参加できたり、録画を公開して再視聴をしていただけるようになりました。ETGは通常のイベントが開催できるようになってもオンラインイベントを継続して情報発信をしていく予定です。この影響と思われますが、新しくEtherCATに関心を持っていただいた方々からネットワークの構築方法に関するご質問を受ける機会が多くなっています。EtherCATのネットワーク設定は技術仕様がわからなくても簡単に動かせるようになっていますが、従来のフィールドバスを経験されている人たちからEtherCATの通信でどのようにスレーブを設定しているのかを知りたいという要望が寄せられています。そこで、2020年6月のトラブルシュートのヒントに引き続き、EtherCATのネットワーク構築に関する情報を解説することにしました。
ネットワークの敷設
EtherCATのネットワークの構築に必要なものはネットワークケーブルです。100Mbit/sのファーストイーサネットを物理層に使っているので、CAT 5以上のシールド付きイーサネットケーブル・コネクタ(100BASE-TX)があればネットワークを敷設できます。取り回しのしやすい細く柔軟なケーブルは100mの最大ケーブル長をサポートしていない場合があるのでメーカーのケーブル仕様を参照してください。スレーブが光ファイバーの通信ポートをもっていたり、EtherCAT対応の光メディアコンバーター経由で100BASE-FXを使用できます。無線LANはそのしくみ上、通信のジッタや予期せぬ遅延をともない、ハードリアルタイム通信を損なうため使用できません。
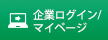
EtherCATスレーブは1個のINポートと1個以上のOUTポートをもっています。最も簡単なトポロジーはスレーブをディジーチェイン接続するライン型です。2個以上のOUTポートをもっているスレーブや、分岐用スレーブ(ジャンクションボックス)を使用すると、ツリー型やスター型のトポロジーも選択できます。ネットワークケーブルでマスターからスレーブを接続すると、接続順に応じたリング状の通信経路が自動的に形成されます。マスターからの通信フレームはその経路に沿ってスレーブを接続順にすべてのスレーブを巡回して通信データの交換を行います。つまり、1つのフレームですべてのスレーブとの通信を効率的に行います。
スレーブのアドレス指定
マスターが通信する対象のスレーブとそのメモリアドレスを特定するしくみのことをアドレス指定といいます。EtherCATには4種類のアドレス指定方法があります。EtherCAT仕様ではスレーブには、旧来のフィールドバスのようなノードアドレススイッチはありません。
■オートインクリメントアドレス:スレーブの並び順で指定する方法です。ネットワーク内のスレーブのスキャン、通信開始時にネットワーク設定情報と実際のネットワークの照合および初期化を行うときに使用します。ネットワークの初期化時にマスターは照合の完了したスレーブにノードアドレスを書き込みます。ノードアドレスは揮発性のレジスタメモリに書き込まれるので電源を切ると失われますが、再接続時にマスターが初期化処理を行います。
■固定物理アドレス:初期化で設定されたノードアドレスを使用して通信を行います。スレーブのレジスタアクセスやMailbox通信(メッセージ通信)など非周期通信で使用します。
■ブロードキャストアドレス:ネットワーク内の全スレーブにアクセスします。
■論理アドレス:仮想的な32bitアドレス空間のメモリブロックのアドレスを使用して通信します。マスターはネットワーク内のスレーブ群のプロセスデータを論理アドレス空間のメモリブロックにまとめます。マスターは各スレーブに対してその内部物理アドレスと対応する論理アドレスを設定します。この設定によってスレーブは自動的に論理アドレスで送られたメモリブロックの該当箇所だけにアクセスします。論理アドレスはプロセスデータ通信で使用します。
以上の4種類のアドレス指定の解決はすべてEtherCATスレーブコントローラー(ESC;専用通信チップ)がハードウェアで自動的に行い、ESCの物理アドレス空間にあるレジスタや通信バッファと通信フレーム間とでデータを交換します。
ステートマシン
EtherCATスレーブには4つ基本状態と1つのオプション状態があり、RUNインジケーターで表示します。以下の説明でカッコ内がRUNの点灯状態です。
■INIT(消灯):スレーブの電源投入後の状態です。ノードアドレスはまだ設定されていません。マスターはオートインクリメントアドレスでスレーブのレジスタを設定して初期化します。
■PREOP(高速点滅):Mailbox通信ができ、スレーブアプリケーションの各種パラメータ(CoEオブジェクトディクショナリなど)にアクセスできます。マスターはプロセスデータ構成を設定します。
■SAFEOP(低速点滅):プロセスデータ通信を開始しますが、出力は安全状態を保ちます。
■OP(点灯):入出力動作を行う正常な運転状態です。
■BOOT(消灯または高速点滅):EtherCATによるファームウェアアップデートをサポートしている場合にこの状態に移行できます。
スレーブの上位の状態遷移はマスターによる必要な設定の完了と遷移リクエストによって行われ、INIT→PREOP→SAFEOP→OPへと順番に移行します。通信障害や設定ミスでエラーが発生したとき、スレーブはエラーの内容に応じた状態に遷移し、ERRインジケータの点灯状態でエラー内容を通知します。マスターや設定ツールの機能を使ってエラーコード(AL Status CodeやSDO Abort Code)を調べると詳しいエラー内容や原因がわかります。ETGやメーカーにサポートを依頼するときは、これらの情報をあわせてお知らせください。
スレーブのアプリケーションのパラメータは不揮発または揮発の場合がありますが、不揮発であってもPREOPからSAFEOPの遷移時にマスターが発行するスタートアップコマンドにデフォルトから変更するパラメータ変更コマンド(CoEの場合SDODownloadなど)を設定してください。マスターはステートマシン管理でこれらのコマンドを送信するのでスレーブを交換しても動作に必要なパラメータが設定されるようになります。
プロセスデータの構成
EtherCATスレーブは一般的にCoEが実装され、そのプロセスデータは3つのレベルで構成されています。
(1)各入出力変数:オブジェクトディクショナリの0x6000番台が入力変数、0x7000番台が出力変数
(2)マッピング:用途や機能に応じて入出力変数をグループ化。0x1600-0x17FFが出力変数マッピング、0x1A00-0x1BFFが入力変数マッピング
(3)アサインメント:マッピングから使用するグループを0x1C1Xに割付け。X=シンクマネージャチャンネル(通常、2=出力、3=入力)
スレーブに実装されている機能の種類などによりプロセスデータの構成方法の自由度が異なります。プロセスデータが固定で変更不可、アサインメントをユーザーが設定可能(さらにマッピングの内容を編集可能)でこれらをマスターから設定、スレーブ自身が接続されている機能モジュールで自動構成してマスターがリードという種類があります。
セキュリティ
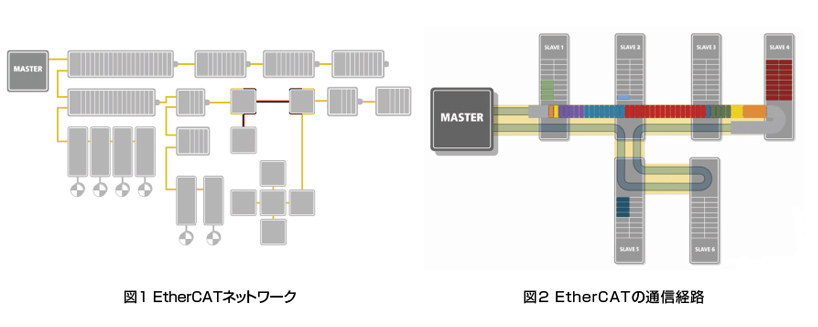
ネットワークの観点からEtherCATのセキュリティ対応について解説します。EtherCATはマスター・スレーブ間の通信にIPアドレスを使用せず、上位ネットワークとスレーブのセグメントが分割されています。上位ネットワークとスレーブセグメントがつながっている場合はスレーブ単位でのセキュリティを考慮する必要がありますが、EtherCATでは不要です。外部からの侵入はマスターの動作するコントローラーの上位ネットワークとの接続ポートにセキュリティ対策を行うことで防げます。外部からの侵入はIPベースであり、コントローラーがIPを使ったフレームをEtherCATセグメントにルーティングしてもEtherCATスレーブはそのフレームを無効なプロトコルとして処理しません。
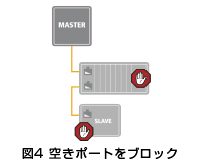 また、動作中のEtherCATスレーブやジャンクションの空きポートに悪意のあるデバイスを接続しても、マスターは設定で不使用のポートを管理し、スレーブの空きポートはマスターによってクローズ状態が指示されているため、外部デバイスからの接続ができないようになっています。
また、動作中のEtherCATスレーブやジャンクションの空きポートに悪意のあるデバイスを接続しても、マスターは設定で不使用のポートを管理し、スレーブの空きポートはマスターによってクローズ状態が指示されているため、外部デバイスからの接続ができないようになっています。
したがって、コントローラーで使用しているOSに用意されたセキュリティ対策を行うことが重要になります。
終わりに
 EtherCATネットワーク設定の基礎知識を解説しましたが、詳しい技術資料「ETG.1600E t h e r C A T 敷設ガイドラインをウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「敷設」を入力してください。関連する資料としてEtherCATネットワーク診断もあります。[テキスト検索]で「診断」を入力してください。
EtherCATネットワーク設定の基礎知識を解説しましたが、詳しい技術資料「ETG.1600E t h e r C A T 敷設ガイドラインをウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「敷設」を入力してください。関連する資料としてEtherCATネットワーク診断もあります。[テキスト検索]で「診断」を入力してください。
お知らせ
コロナウィルス感染拡大の影響を考慮して2021年度のイベントスケジュールの調整を行っています。オンラインイベントを定期実施しつつ、安全に開催できるようになればセミナーや展示会出展を再開する予定です。イベント情報は随時ETGウェブサイトに掲載し、登録者には案内メールにてお知らせさせていただきます。ETGウェブサイトではEtherCATの基本技術や特徴をわかりやすく解説したマルチメディアコンテンツを順次公開しています。日本語字幕版も順次追加していますのでぜひご覧ください。YoutubeのチャンネルEtherCATGroupからアクセスできます。
EtherCAT Technology Group (ETG)について
ETGはEtherCATの技術仕様の管理と拡張、セミナーや展示会などのプロモーションを行っています。2020年12月1日現在、ワールドワイドのメンバー数は6030社からなる世界最大のフィールドバス団体です。日本国内では690社が参加しています。
問い合わせ先
EtherCAT Technology Group日本オフィス
〒231-0062 神奈川県横浜市中区桜木町1-1-8 日石横浜ビル18F
TEL : 045-650-1610
FAX : 045-650-1613
お問い合わせ : info.jp@ethercat.org
技術サポート : support.jp@ethercat.org
ウェブサイト : www.ethercat.org/jp.htm
EtherCATメンバーリンク:https://www.ethercat.org/jp/members.php
- 超高速オープンフィールドバス 製品カタログ
- ベッコフオートメーション(株)
- 超高速オープンフィールドバスであるEtherCAT ターミナル「EK/ELシリーズ」の製品カタログ。導入実績、システム概要、特長と併せ、ターミナル選定における基本事項...


- EtherCAT対応製品のご紹介
- ヒルシャー・ジャパン(株)
- EtherCAT 通信に必要なハードウェア、ソフトウェアをワンモジュールに実装した完全実行型インターフェース。短期間・低コスト、且つハイパフォーマンスでEtherCATマスタおよびスレーブを実現できます。...

- EtherCAT対応製品のご紹介
- CKD(株)
- 方向制御弁、ダイレクトドライブモータ、電動アクチュエータなど...




