
製品ナビ×EtherCAT特集
2021年9月1日 UPDATE

EtherCATスレーブ設定情報(SCI)を新しく拡張
~スレーブ設定が誰でも簡単に~
EtherCAT Technology Group 日本オフィス
Representative/Technologist 小幡正規
Representative/Technologist 小幡正規
はじめに
EtherCAT Technology Groupでは、EtherCATマスター・スレーブ間のインターオペラビリティー向上を目的に世界各地でPlug Festを開催してきました。Plug Festは参加者がデバイスを持ち寄り、コンフォーマンスや相互接続性を確認するイベントです。通常、欧州で年に2回、日本および北米で1回、その他アジア地域で隔年で実施しています。残念ながら昨年以降、COVID-19の影響によりこのようなイベントの開催が難しい状況となりましたが、デバイス開発者を支援するために新しくインターオペラビリティーテスト・ワークショップ(ITW)を試みています。すでに欧州、北米、中国ならびに韓国で実施し、参加者から高く評価されました。このイベントは、コンフォーマンス、各種機能実装および新しい仕様の詳細な解説のWebinarと、参加者とETG技術スタッフによる個別技術相談を行うエキスパートセッションからなるオンラインイベントです。ETGの日本メンバー向けに9月に開催しています。
本記事では、ITW Webinarのトピックの一つでもある新しく策定されたスレーブ設定情報( Slave Configuration Information : S C I ) とともに、マスターメーカーに依存しない診断インタフェースについて紹介いたします。これらの機能は両者ともにEtherCATを利用するユーザーの利便性を高める機能になり、EtherCATをさらに簡単に便利に使用できるように実装が望まれるものになります。
スレーブ設定情報(SCI)
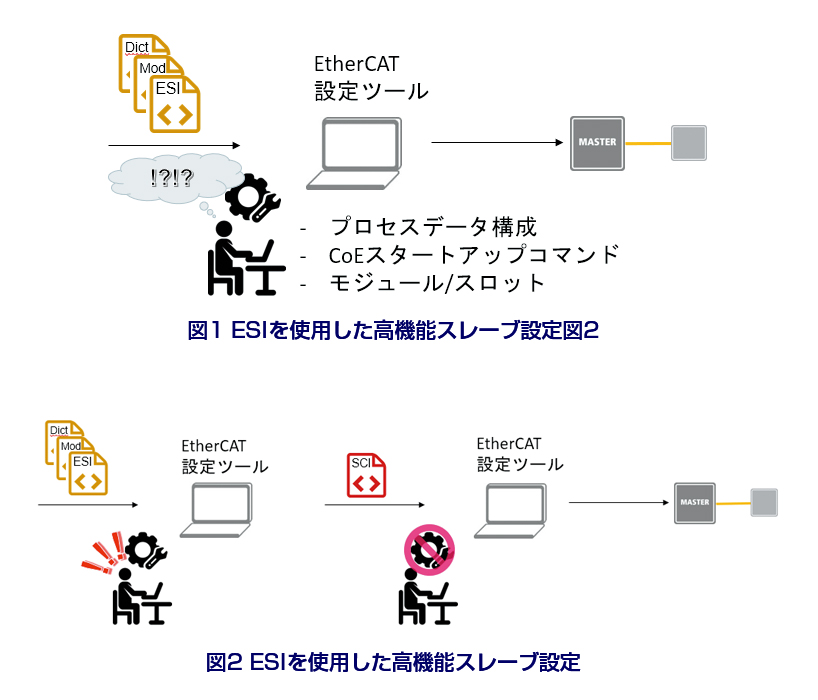
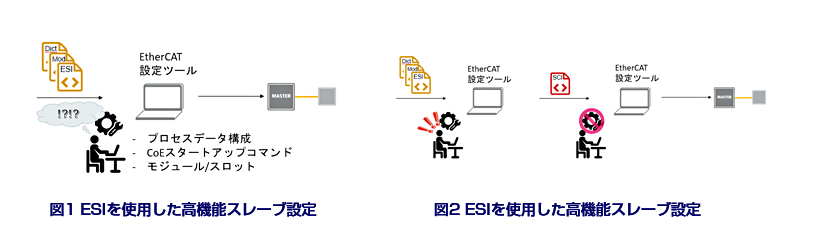
EtherCATスレーブの設定には、EtherCATスレーブ情報(ESI)ファイルまたはスレーブ内の不揮発性メモリに格納されたESIに準じるスレーブ情報インタフェース(SII)を使用するのが一般的です。ESIにはスレーブがサポートするプロセスデータマッピング(プロセスデータ変数のグループ)のすべての構成、パラメータセットであるCoEオブジェクトディクショナリの構造とデフォルト値、サポートするスロットとモジュール情報などスレーブがサポートする機能設定を網羅するあらゆる情報が記述されています。EtherCATネットワークの設定を行うときには、これらの情報から
使用したい機能に適切なプロセスデータマッピングの組み合わせを選択し、場合によってはプロセスデータマッピングの内容を変更したり、使う機能が狙いどおりに動作するようにCoEオブジェクトの値を設定したりする必要があります(図1)。
しかし、高機能なデバイスや多様なモジュールをサポートするような場合には、選択したいデバイス機能の動作について深い知識が必要だったり、適切なパラメーター設定値をデバイスの技術ドキュメントから調べなければならなかったりすることがあります。それには、モジュールやプロセスデータマッピングをどのような組み合わせで選択するのか、そのときの適切なCoEオブジェクトの設定値はどのようにすべきかなどがあります。制御ネットワークや保守のエンジニアにとっては、設定ツールでどのようにすればそれらを変更できるのかはわかっていても、どのような設定がそのデバイスの機能に対して妥当であるのかは調べることになります。
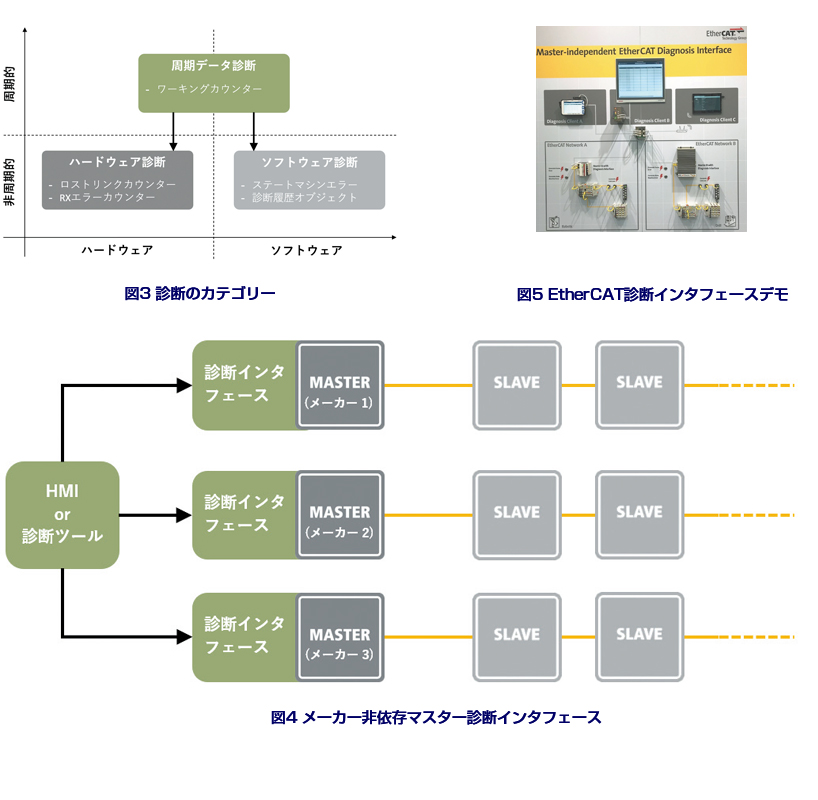
SCIは、このような特定のデバイスに依存した設定のためだけの知識を必要とせずに、簡単にデバイス設定を行うことを目的として策定されました。SCIはESIファイルをベースに特定目的の構成や設定が記述されたファイルとして提供され、ESIファイルの代わりにSCIを使用することで設定が完了します(図2)。
SCIファイルは、誰でも作成できます。ESIファイルをXMLエディタで編集することも可能ですが、一般的にはESIファイルを用いて設定ツール上で特定の用途向けの設定変更を行い、SCIファイルにエクスポートします。デバイスメーカーがESIファイルと同様に、目的ごとのSCIを用意してユーザーに提供する、システムインテグレーターやデバイスの知識をもつ装置メーカーの技術者が装置の制御ネットワーク開発者に提供する、あるいは制御ネットワーク開発者が設定の再利用などのためにSCIファイルを自作するなどのさまざまな活用方法が考えられます。つまり、今までは1個
のデバイスには1個のESIファイルでしたが、これに加えて機能設定ごとの複数のSCIファイルを提供できるようになります。ESIファイルの拡張子は「.XML」でしたが、SCIファイルでは「.SCI」となり、設定ツールが区別できるようになっています。
SCIファイルは特定の機能設定が完了した状態ですので、これ以上の設定変更は行えません。例えば、プロセスデータマッピングはそのプロセスデータ変数の構成が固定であり、必ず通信に使用されます。また、決まったスロットに固定的にモジュールが割り付けられます。
SCIの記述はESIをベースとするので、ESIファイルの書き方と完全に同じです。ESIのXML記述と同じスキーマを使用し、ESIでは使用しなかったCoEオブジェクトのスタートアップコマンドが定義できるなど、ESI仕様書がSCI対応のために拡張されました。ETG.2000 ESI仕様書 V1.0.12にSCIで使用するXMLエレメントやアトリビュートが追加され、これに対応するスキーマ V1.15がリリースされています。
SCIが利用できるかは、EtherCATのネットワーク設定ツールがSCIのインポート・エクスポートに対応し、ESIの代わりにSCIをネットワーク設定に使用できるかどうかというだけです。デフォルトのESIからの設定変更をSCIで簡単化できるだけなので、既存のEtherCATマスターやデバイスはそのままです。デバイスメーカーは前述のようにユーザーの利便性を向上するためにSCIファイルを提供できます。SCIを活用していただき、EtherCATが簡単に便利に活用できる環境が整っていくことでしょう。
スレーブ設定情報(SCI)
EtherCATスレーブの設定には、EtherCATスレーブ情報(ESI)ファイルまたはスレーブ内の不揮発性メモリに格納されたESIに準じるスレーブ情報インタフェース(SII)を使用するのが一般的です。ESIにはスレーブがサポートするプロセスデータマッピング(プロセスデータ変数のグループ)のすべての構成、パラメータセットであるCoEオブジェクトディクショナリの構造とデフォルト値、サポートするスロットとモジュール情報などスレーブがサポートする機能設定を網羅するあらゆる情報が記述されています。EtherCATネットワークの設定を行うときには、これらの情報から使用したい機能に適切なプロセスデータマッピングの組み合わせを選択し、場合によってはプロセスデータマッピングの内容を変更したり、使う機能が狙いどおりに動作するようにCoEオブジェクトの値を設定したりする必要があります(図1)。
しかし、高機能なデバイスや多様なモジュールをサポートするような場合には、選択したいデバイス機能の動作について深い知識が必要だったり、適切なパラメーター設定値をデバイスの技術ドキュメントから調べなければならなかったりすることがあります。それには、モジュールやプロセスデータマッピングをどのような組み合わせで選択するのか、そのときの適切なCoEオブジェクトの設定値はどのようにすべきかなどがあります。制御ネットワークや保守のエンジニアにとっては、設定ツールでどのようにすればそれらを変更できるのかはわかっていても、どのような設定がそのデバイスの機能に対して妥当であるのかは調べることになります。
SCIは、このような特定のデバイスに依存した設定のためだけの知識を必要とせずに、簡単にデバイス設定を行うことを目的として策定されました。SCIはESIファイルをベースに特定目的の構成や設定が記述されたファイルとして提供され、ESIファイルの代わりにSCIを使用することで設定が完了します(図2)。
SCIファイルは、誰でも作成できます。ESIファイルをXMLエディタで編集することも可能ですが、一般的にはESIファイルを用いて設定ツール上で特定の用途向けの設定変更を行い、SCIファイルにエクスポートします。デバイスメーカーがESIファイルと同様に、目的ごとのSCIを用意してユーザーに提供する、システムインテグレーターやデバイスの知識をもつ装置メーカーの技術者が装置の制御ネットワーク開発者に提供する、あるいは制御ネットワーク開発者が設定の再利用などのためにSCIファイルを自作するなどのさまざまな活用方法が考えられます。つまり、今までは1個のデバイスには1個のESIファイルでしたが、これに加えて機能設定ごとの複数のSCIファイルを提供できるようになります。ESIファイルの拡張子は「.XML」でしたが、SCIファイルでは「.SCI」となり、設定ツールが区別できるようになっています。
SCIファイルは特定の機能設定が完了した状態ですので、これ以上の設定変更は行えません。例えば、プロセスデータマッピングはそのプロセスデータ変数の構成が固定であり、必ず通信に使用されます。また、決まったスロットに固定的にモジュールが割り付けられます。
SCIの記述はESIをベースとするので、ESIファイルの書き方と完全に同じです。ESIのXML記述と同じスキーマを使用し、ESIでは使用しなかったCoEオブジェクトのスタートアップコマンドが定義できるなど、ESI仕様書がSCI対応のために拡張されました。ETG.2000 ESI仕様書 V1.0.12にSCIで使用するXMLエレメントやアトリビュートが追加され、これに対応するスキーマ V1.15がリリースされています。
SCIが利用できるかは、EtherCATのネットワーク設定ツールがSCIのインポート・エクスポートに対応し、ESIの代わりにSCIをネットワーク設定に使用できるかどうかというだけです。デフォルトのESIからの設定変更をSCIで簡単化できるだけなので、既存のEtherCATマスターやデバイスはそのままです。デバイスメーカーは前述のようにユーザーの利便性を向上するためにSCIファイルを提供できます。SCIを活用していただき、EtherCATが簡単に便利に活用できる環境が整っていくことでしょう。
メーカー非依存マスター診断インタフェース
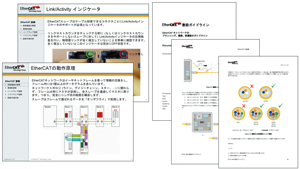
EtherCATのネットワーク診断は、動作中の周期プロセスデータ通信を処理したスレーブ数を表すカウンター値(ワーキングカウンター)で継続的に行い、設定通りの台数のスレーブが正しく処理を完了していることをチェックしています。一部のスレーブで障害が発生し、ワーキングカウンター値が不正値となったときに障害原因の診断を開始します。また、ハードウェア的な障害の診断には各デバイス内で保持している通信ポートごとのロストリンクカウンターやRXエラーカウンターなどを元に通信障害の発生箇所を特定します。アプリケーション側の障害診断としては、デバイスのステートマシンの状態、発生しているエラーコード、CoEオブジェクトディクショナリ内の診断履歴オブジェクトなどを活用して障害原因を把握できます(図3)。
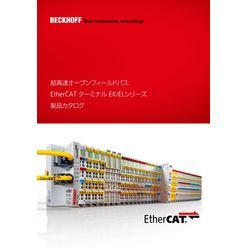
診断機能はEtherCATマスターが標準的に備え、動作ログや設定ツールの診断機能で提供しているものですが、使用するマスターやツールにより診断情報を参照するための画面や手順が異なります。異なるマスターが混在した環境の診断性の向上のため、マスターメーカーに依存しない診断インタフェース機能を仕様化しました。共通の診断クライアントで様々なマスター下のEtherCATネットワークの動作状況を診断できます(図4)。
スレーブ側の変更はなく、従来からあったマスター内のパラメーター一覧(マスターオブジェクトディクショナリー)と通信機能(メールボックスゲートウェイ)を組み合わせ、スレーブの診断情報を保持するエリア構成を新しく定義しています。つまり、既存のマスターでも簡単に少ないリソースで機能追加ができるようになっているので、ソフトウェアアップデートによる対応が可能です。
EtherCAT Technology Groupはマスターにこの診断インタフェースの実装を推奨しています。広く使用されているEtherCATマスターソフトウェアやマスタースタックではすでにこの機能のサポートが始まっています。EtherCATネットワーク構築の際にはこの機能に対応もしくは対応予定のマスターの選定をおすすめします。
終わりに
 EtherCAT Technology GroupはこれからもEtherCATの使いやすさ向上のための機能を充実させていきます。今回紹介したスレーブ設定情報 (SCI)は、より簡単にEtherCATデバイスを設定できるようにするものです。また、運用時の障害検出をマスターメーカーに依存しない1つのツールで 実現するマスター非依存診断インタフェースの拡張も行い、普及が進んでいます。得られた診断情報の理解と障害や発生箇所の特定に役立つ技術資料「ユーザー向けEtherCAT診断」をウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「診断」を入力してください。関連する資料としてEtherCATネットワークの敷設に関するガイドラインもあります。
EtherCAT Technology GroupはこれからもEtherCATの使いやすさ向上のための機能を充実させていきます。今回紹介したスレーブ設定情報 (SCI)は、より簡単にEtherCATデバイスを設定できるようにするものです。また、運用時の障害検出をマスターメーカーに依存しない1つのツールで 実現するマスター非依存診断インタフェースの拡張も行い、普及が進んでいます。得られた診断情報の理解と障害や発生箇所の特定に役立つ技術資料「ユーザー向けEtherCAT診断」をウェブサイトで公開しています。ETGウェブサイト(https://www.ethercat.org/jp.htm)の[ダウンロード]ページで[テキスト検索]に「診断」を入力してください。関連する資料としてEtherCATネットワークの敷設に関するガイドラインもあります。
[テキスト検索]で「敷設」を入力してください。
お知らせ
コロナウィルス感染拡大の影響を考慮して2021年度のイベントスケジュールの調整を行っています。オンラインイベントを定期実施しつつ、安全に開催できるようになればセミナーや展示会出展を再開する予定です。イベント情報は随時ETGウェブサイトに掲載し、登録者には案内メールにてお知らせさせていただきます。ETGウェブサイトではEtherCATの基本技術や特徴をわかりやすく解説したマルチメディアコンテンツを順次公開しています。日本語字幕版も順次追加していますのでぜひご覧ください。YoutubeのチャンネルEtherCATGroupからアクセスできます。
EtherCAT Technology Group (ETG)について
ETGはEtherCATの技術仕様の管理と拡張、セミナーや展示 会などのプロモーションを行っています。2021年8月時点で、ワールドワイドのメンバー数は6315社からなる世界最大のフィールドバス団体です。日本国内では710社が参加しています。
問い合わせ先
EtherCAT Technology Group日本オフィス
〒231-0062 神奈川県横浜市中区桜木町1-1-8 日石横浜ビル18F
TEL : 045-650-1610
FAX : 045-650-1613
お問い合わせ : info.jp@ethercat.org
技術サポート : support.jp@ethercat.org
ウェブサイト : www.ethercat.org/jp.htm
EtherCATメンバーリンク:https://www.ethercat.org/jp/members.php
- 超高速オープンフィールドバス 製品カタログ
- ベッコフオートメーション(株)
- 超高速オープンフィールドバスであるEtherCAT ターミナル「EK/ELシリーズ」の製品カタログ。導入実績、システム概要、特長と併せ、ターミナル選定における基本事項...


- EtherCAT対応製品のご紹介
- ヒルシャー・ジャパン(株)
- EtherCAT 通信に必要なハードウェア、ソフトウェアをワンモジュールに実装した完全実行型インターフェース。短期間・低コスト、且つハイパフォーマンスでEtherCATマスタおよびスレーブを実現できます。...

- E αSTEP AZシリーズ 多軸ドライバ DC電源入力
- オリエンタルモーター(株)
- AZシリーズ DC電源入力のモーターと、それらを搭載している電動アクチュエータを接続できる多軸ドライバ...