
製品ナビ×EtherCAT特集
2023年7月12日 UPDATE

EtherCAT 20周年!
~20年間のEtherCATの歩みと
最新機能ダイナミックプロセスデータチャネル~
EtherCAT Technology Group 日本オフィス
Representative/Technologist 小幡正規
Representative/Technologist 小幡正規
はじめに
 今年はEtherCATが発表されてから20年という記念の年です。この20年の間、EtherCATは後方互換性を完全に維持しながら、様々な技術拡張を追加することで進化してきました。これだけの期間を経た現在でもEtherCATは最高速かつ高効率の産業用イーサネットであるという事実は変わらず、この性能を超える新しいネットワークは現れていません。ここでは、EtherCATのこれまでのマイルストーンと現在の動向を紹介するとともに、初めてEtherCATのノード数を公表します。さらに新たな拡張機能であるダイナミックプロセスデータチャネル(Dynamic ProcessData Channel: DPC)の技術や利点を解説します。
今年はEtherCATが発表されてから20年という記念の年です。この20年の間、EtherCATは後方互換性を完全に維持しながら、様々な技術拡張を追加することで進化してきました。これだけの期間を経た現在でもEtherCATは最高速かつ高効率の産業用イーサネットであるという事実は変わらず、この性能を超える新しいネットワークは現れていません。ここでは、EtherCATのこれまでのマイルストーンと現在の動向を紹介するとともに、初めてEtherCATのノード数を公表します。さらに新たな拡張機能であるダイナミックプロセスデータチャネル(Dynamic ProcessData Channel: DPC)の技術や利点を解説します。
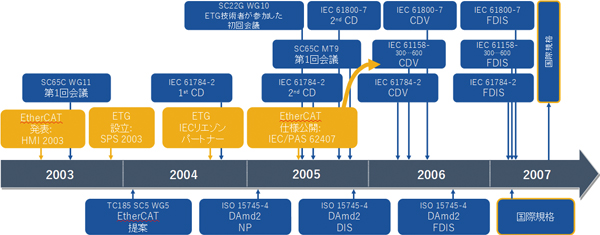
EtherCAT: マイルストーン
ここでは、20年のEtherCATの歴史を振り返ってみましょう。 EtherCATは独ベッコフオートメーションが開発したイーサネットをベースとしたフィールドバ スです。産業用イーサネットに分類されるネットワークですが、従来のスイッチングハブにより ネットワークを構築する技術がかかえるリアルタイム性、通信効率などの問題に対するブレイ クスルーとして大きく注目を集めました。EtherCATは専用通信チップでフレームを通過させ ながらデータを入出力し、フレームルーティングをすることが特徴です。これらは以下のような 産業イーサネットの問題を改善します。
- ■ソフトウェアによるフレーム処理をなくし、低遅延・低ジッタを実現
- ■送受信データを処理するだけなのでソフトウェアスタックが単純かつ軽量
- ■スイッチングハブが不要のため、バッファリングによる不規則な遅延がない
- ■デバイスに個別フレームを送る必要がなく、1つのフレームで全デバイスとの通信が完了し、フレームヘッダー・トレーラーやパディングなどの無駄な通信部分を最小化

EtherCATの標準化と普及を目的とする組織としてEtherCAT Technology Group(ETG)は同年の11月SPS/IPC/Drives(当時の名称)の期間中に設立されました。当初の設立メンバーはわずか33社で、ほぼ独および欧州のデバイスメーカーや通信技術メーカーですが、この時点ですでに先見性のあるユーザーがEtherCATの優位性に興味を示していることがわかります。この名残で現在もETGメンバー総会はSPS(現在の名称)の開催中に行われています。

2005年には標準EtherCAT通信をブラックチャネルとして利用する方式で、機能安全プロトコルSafety over EtherCAT(FSoE)が公表されました。
EtherCAT Mainデバイスは標準のイーサネットポートを使用し、ソフトウェアで機能実装を行いますが、SubデバイスはEtherCAT Subデバイスコントローラー(ESC)という通信用のハードウェアが必要です。立ち上げ期間中の技術検討と改善を行う中で、最初のESCはFPGAで提供されましたが、仕様が確定した後、最初のASICを2006年にリリースしています。FPGAと比べて低コストでフットプリントの小さいASIC版ESCの登場によってEtherCATデバイスの開発が加速していきます。その後、大手チップメーカーからライセンスされたESC機能とマイクロプロセッサーを統合したSoCなどが多数リリースされる状況になっています。
EtherCATの国際規格化は2007年です。IEC 61158のType 12がEtherCATであり、これはETG.1000 EtherCAT仕様書と同一のドキュメントです。IEC 61800-7は電気を動力とするモーターの規格で、EtherCATのCiA402やSERCOSベースのプロファイルが定義されています。IEC 61784-2 CPF12は通信プロファイルの規格となっており、通信メディアやコネクタなどのネットワーク敷設などに関して定義されています。
2009年には対応デバイスのコンフォーマンステスト仕様が整備されました。同年春に独、夏に日本にEtherCATテストセンター(ETC)を開設しています。さらには北米、中国でもオープンし、現在は世界の4箇所でテストサービスを提供しています。ETCはETGが認定した公式テストセンターで。
EtherCATは2012年に韓国、2014年に中国の国家規格になっています。これはアジアにおけるEtherCATの普及に大きく貢献しています。

2016年のEtherCAT PおよびEtherCAT Gは技術的なトピックになります。
EtherCAT Pは100BASE-TXの4線の通信ラインに2組のDC24V 3Aの電源供給機能をカップリングさせる技術です。従来のPoEとは異なり、産業用途で一般的なDC24Vに対応していること、EtherCAT Pのトポロジー内で電源を後続デバイスに供給できることが特徴です。専用コネクタや2色に色分けされたケーブルを使用して誤接続を防止します。制御盤外で使用する耐環境デバイスを接続するときに省配線化を実現できます。
 EtherCAT Gは、現在開発中の技術で す。EtherCAT G対応デバイスは、物理 層とESCをGbイーサネット対応する だけです。ただし、単純に100Mbを Gb化してもデータ転送レートは向上し ますが伝送遅延は変わらないため大き な性能改善は望めません。また、Gb イーサネットは100Mbに比べてノイ ズ耐性が低くなります。そこで、 EtherCAT Gの活用シナリオとしては主に2つを考えています。1つは、高速サンプリング計測、ビ ジョンデータや高機能モーションなど100Mbで帯域が不足するような大容量データを扱うデバ イスのEtherCAT G化です。もう1つは、多数のデバイスからなる巨大EtherCATネットワークの EtherCAT Gによる幹線とネットワークのセグメント化です。この場合、従来のデバイスをそのまま 活用します。数~数十バイト程度の一般的なデバイスはEtherCAT G化する必要はありません。 幹線とセグメント間のルーティングデバイスとしてEtherCATブランチコントローラー(EBC)とい う新しいデバイスが定義される予定です。EBCは幹線から特定のセグメント宛てにフレームをルー ティングします。標準EtherCATネットワークでフレームが全てのデバイスを通過するのに対し、セ グメント宛てのフレームは幹線から指定されたセグメントだけを通過し、直ちにMainデバイスに戻 ります。これにより、フレームの伝送遅延を大幅に削減できます。 このように、EtherCATはさらなる性能や利便性向上のための機能拡張を今後も活発に行なって いく予定です。
EtherCAT Gは、現在開発中の技術で す。EtherCAT G対応デバイスは、物理 層とESCをGbイーサネット対応する だけです。ただし、単純に100Mbを Gb化してもデータ転送レートは向上し ますが伝送遅延は変わらないため大き な性能改善は望めません。また、Gb イーサネットは100Mbに比べてノイ ズ耐性が低くなります。そこで、 EtherCAT Gの活用シナリオとしては主に2つを考えています。1つは、高速サンプリング計測、ビ ジョンデータや高機能モーションなど100Mbで帯域が不足するような大容量データを扱うデバ イスのEtherCAT G化です。もう1つは、多数のデバイスからなる巨大EtherCATネットワークの EtherCAT Gによる幹線とネットワークのセグメント化です。この場合、従来のデバイスをそのまま 活用します。数~数十バイト程度の一般的なデバイスはEtherCAT G化する必要はありません。 幹線とセグメント間のルーティングデバイスとしてEtherCATブランチコントローラー(EBC)とい う新しいデバイスが定義される予定です。EBCは幹線から特定のセグメント宛てにフレームをルー ティングします。標準EtherCATネットワークでフレームが全てのデバイスを通過するのに対し、セ グメント宛てのフレームは幹線から指定されたセグメントだけを通過し、直ちにMainデバイスに戻 ります。これにより、フレームの伝送遅延を大幅に削減できます。 このように、EtherCATはさらなる性能や利便性向上のための機能拡張を今後も活発に行なって いく予定です。
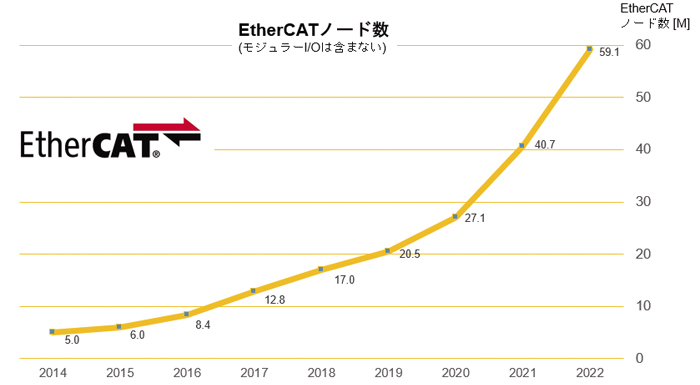
EtherCAT累積ノード数の推定
ETGは、これまでEtherCATのノード数を公表していませんでした。今回初めて公表できるよう になったのには理由があります。ETGとしてはノード数という定量的な数値を発表するにあたり 正確性が重要であると考えています。発表するに際し、算出の根拠を示す必要があると考えてい ました。前述のようにEtherCATは当初FPGAベースのESCで始まり、この実装によるデバイス が多数ありましたが、ライセンスの仕組みによりその数値の把握は困難でした。もちろん、デバイ スメーカーは出荷数をETGに報告するような義務はありません。現在はASICベースが主流と なっているため、チップ出荷数を把握できます。この推定ではFPGAベースのデバイスは全体の 10%未満であると仮定しています。ASICの出荷数に市場在庫も含まれるため厳密にはノード 数ではありませんが、一定の市場在庫で推移するので、多少のタイムラグでそのノード数に達す るのは間違いありません。2022年末の統計ではEtherCATノード数は5910万ノードです。
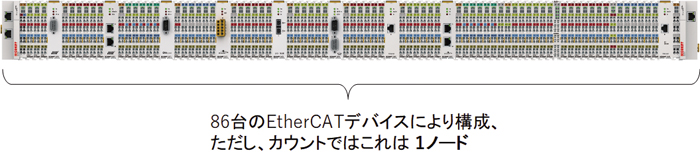
なお、この推定にはモジュラータイプのEtherCAT I/Oはカウントされていません。例えば、以下のような構成では、スライスI/O単位がEtherCATデバイスですが、これを1ノードとカウントしています。モジュラーI/Oで使用するESCは型番が異なり、ノード数カウントには含まれていません。
ダイナミックプロセスデータチャネル(DPC)
 従来、EtherCATはSubデバイスが周期通信するプロセスデータを設定時に確定し、動作中に動的に変更することはできませんでした。これは、周期通信フレームを固定することでリアルタイム通信を行うためには必要なルールです。このしくみを維持しつつ、追加の周期通信を行う必要がある場合にだけ、プロセスデータを追加する方法を定義したものがダイナミックプロセスデータチャネル(DPC)です。標準の周期通信フレームは固定化されているので、DPCで追加するプロセスデータはその時だけ動的に生成する周期フレームを使用します。
従来、EtherCATはSubデバイスが周期通信するプロセスデータを設定時に確定し、動作中に動的に変更することはできませんでした。これは、周期通信フレームを固定することでリアルタイム通信を行うためには必要なルールです。このしくみを維持しつつ、追加の周期通信を行う必要がある場合にだけ、プロセスデータを追加する方法を定義したものがダイナミックプロセスデータチャネル(DPC)です。標準の周期通信フレームは固定化されているので、DPCで追加するプロセスデータはその時だけ動的に生成する周期フレームを使用します。
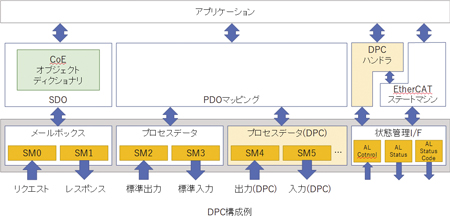
プロセスデータは入力と出力プロセスデータの通信バッファを管理するSyncManagerチャネルをそれぞれ使用します。DPCによる入出力プロセスデータがあるとき、追加のSyncManagerチャネルを使用し、動的にプロセスデータを構成し有効化します。一般的に設定で選択したプロセスデータの構成とデバイス側の構成が異なるとエラーとなりますが、DPCによる追加のプロセスデータを設定・有効化するときに、構成の矛盾によって標準プロセスデータによる通常運転が妨げられないようにする必要があります。このため、DPCに加えて警告通知(Warning Indication)という機能定義がされました。DPCの追加プロセスデータによるエラーが発生すると、これはEtherCATステートマシン上では警告という扱いになり、エラーによる状態遷移は発生せず、標準プロセスデータによる運転は継続されます。この警告と原因は、普段の状態通知に使用するレジ スタ経由でMainデバイスに通知するようになっています。
DPCを使用するには、この機能に対応したMainデバイスとSubデバイスが必要です。特にSubデバイスの場合、追加プロセスデータのために使用できる空きSyncManagerチャネルが要件になります。一般的に4つのSyncManagerがあれば標準的なSubデバイスを実装できますが、各1個のDPCの入出力に対応するには6チャネルが必要です。
この新しい技術は、まもなくETG.1020に組み込まれる予定です。興味のあるETGメンバーはドラフト版仕様書が公開されていますので、ETG Webサイトのダウンロードページから入手してください。
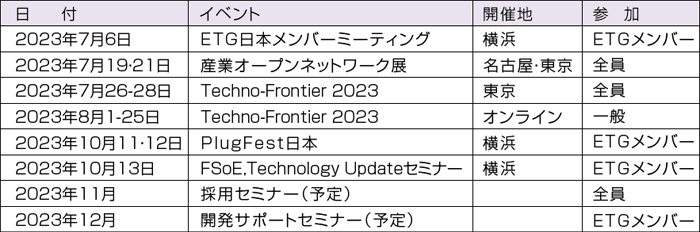
お知らせ
ETGはこの夏から秋にかけてセミナーや展示会出展を多数開催いたします。セミナー等のイベン トはETG Webサイトに参加申込みページを解説します。ぜひご参加ください。
EtherCAT Technology Group (ETG)について
ETGはEtherCATの技術仕様の管理と拡張、セミナーや展示会などのプロモーションを行ってい ます。2023年4月の時点で、ワールドワイドのメンバー数は7150社からなる世界最大のフィー ルドバス団体です。日本国内では770社が参加しています。
問い合わせ先
EtherCAT Technology Group日本オフィス
〒231-0062 神奈川県横浜市中区桜木町1-1-8 日石横浜ビル18F
TEL : 045-650-1610
FAX : 045-650-1613
お問い合わせ : info.jp@ethercat.org
技術サポート : support.jp@ethercat.org
ウェブサイト : www.ethercat.org/jp.htm
Twitter :@EtherCAT_Japan
- 超高速オープンフィールドバス 製品カタログ
- ベッコフオートメーション(株)
- 超高速オープンフィールドバスであるEtherCAT ターミナル「EK/ELシリーズ」の製品カタログ。導入実績、システム概要、特長と併せ、ターミナル選定における基本事項...


- バッテリレス アブソリュートセンサ搭載 αSTEP AZシリーズ
- オリエンタルモーター(株)
- モーターに新開発のABZO(アブゾ)センサを搭載し、 バッテリレスのアブソリュートシステムの構築を実現...

- ソフトモーションコントローラ WMX3 with EtherCAT
- モベンシス(株)
- 独自のEtherCATソフトマスタ技術を融合
EtherCATベースのソフトモーションコントローラ。従来のモーションコントローラでは不可能な制御性能をソフトウェアのみで実現する。最大128軸のサーボ、6万点以上のI/Oを完全同期し、高速制御が可能。...

- EtherCATネットワークモーション
- パナソニックインダストリー(株)
- 1ユニットで最大32軸の モーションコントロールを実現...

- EtherCATソリューション
- ICOP I.T.G.(株)
- グラフィカル・プログラミング ツールとビッグデータ・ライブラリにより、ユーザのリアルタイム・インダストリー 4.0 へのアップグレードを加速...

- SANMOTION サーボシステム
- 山洋電気株式会社
- 高性能なモーションコントローラと多数のラインアップをそろえたサーボシステム。簡単制御でコンパクト、多彩なロボット制御を実現...