
ダイレクトドライブ方式サーボモータロボットフィンガー
2016/07/27
SMAC JAPAN
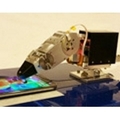
SMACは2015年に米国シカゴで開催された展示会Automate 2015に於いて、世界で初めてとなるムービングコイル技術を用いた、ダイレクトドライブ方式サーボモータロボットフィンガーの試作品を展示致しました。展示ではロボットフィンガーがスマートフォンのタッチスクリーンを操作するデモを実施。欧州のある工学系有名大学は本モータがロボットフィンガー制御の技術革新になり得るとコメントしています。SMACは2016年初旬に本ロボットフィンガー、続いて親指、そして人間の手を想定したロボットハンドを順次リリースする予定です。
ロボットフィンガーの関節部分のモータは回転軸分解能0.023°/p(15500p/rev)のエンコーダを内蔵した部分回転サーボモータです。可動範囲は90度です。SMAC独自のコイルと回路設計により、モータの直系比で高トルクを実現しています。
1つ目のモータは直径25mmで第2関節に当たります。第3関節のモータは直径35mmです。トルクは630mNmあり、指先では7Nの推力を発生します。このモータは指の付け根に当たる部分でもあり、横方向へも動きます。
2つのモータは人間の指関節と近似の45度の範囲で動きます。これらのモータが連携することで、ロボットフィンガーは人間の指に近い動きをすることができます。サーボモータを組み込んだロボット指の重さは約350gで、サイズは平均成人男子の指の約1.5倍です。
ロボットフィンガーの関節部分のモータは回転軸分解能0.023°/p(15500p/rev)のエンコーダを内蔵した部分回転サーボモータです。可動範囲は90度です。SMAC独自のコイルと回路設計により、モータの直系比で高トルクを実現しています。
1つ目のモータは直径25mmで第2関節に当たります。第3関節のモータは直径35mmです。トルクは630mNmあり、指先では7Nの推力を発生します。このモータは指の付け根に当たる部分でもあり、横方向へも動きます。
2つのモータは人間の指関節と近似の45度の範囲で動きます。これらのモータが連携することで、ロボットフィンガーは人間の指に近い動きをすることができます。サーボモータを組み込んだロボット指の重さは約350gで、サイズは平均成人男子の指の約1.5倍です。