
【カタログプレビュー】ロボットハンド D-Hand
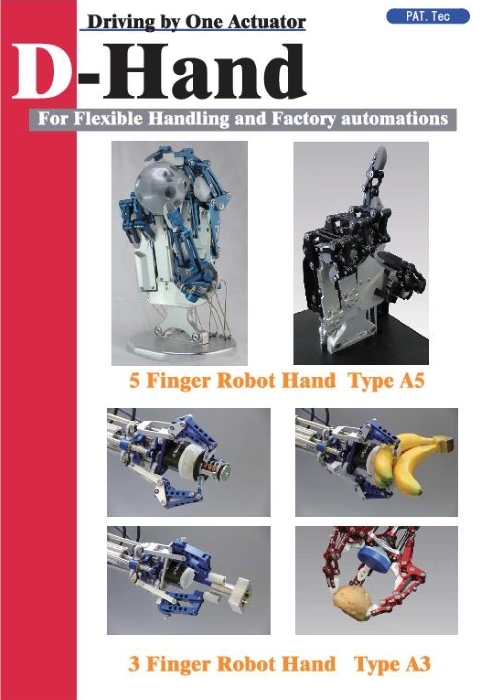
【D-Hand】は、「やじろべえ式」のリンク機構を持つアクチュエーター駆動のロボットハンド。このリンク機構と各指の4節リンク機構により、各関節への力を自動調節し均等な把持力で安定した把持を実現する。主に自動車関連部品をはじめ、工業製品(金属部品・非鉄金属)、食品類の搬送など、多品種・多形状生産におけるツールチェンジを大幅に削減するマルチロボットハンドとして使用できる。3指タイプのTypeA3HとTypeA3M、各種・空圧駆動とサーボモーター駆動の4タイプをラインアップ。TypeA3H/Mは1指3関節/2関節/平行把持の3種類のフィンガータイプを選択可能。またTypeA3Mは、把持姿勢や対象物の周辺のクリアランスに応じて、サーボモーターで3指の取付配列角度を電動で可変できる。標準品以外にも特注仕様での対応、各社アームロボット、画像システムとの組合せなど、生産システムの提案にも対応している。
発行元:ダブル技研(株)