企業基本情報


一緒に閲覧されている製品










自動サンプル分注システムのお問い合わせ













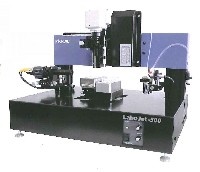
<システムディスペンサMG1000ILL>
Lサイズ基板(510×460mm)に対応したインライン塗布装置。IEIオリジナルプログラム作成支援ソフトEzEDITORによりプログラミングおよび編集が簡単。カメラ搭載により自動塗布位置補正が可能。
■オプション:レーザー変位センサによるニードル高さ自動補正が可能。

<マルチアプリケーション対応ディスペンスロボット>
剛性を備えた小型卓上型ロボット。低粘度から高粘度材料まであらゆる接着剤塗布に対応する他、UV照射、ネジ締め、基板分割などで使用可能。幅広いアプリケーションを自動化。高い再現性によりセル生産に最適。省スペースによりラインの組み替えが容易。













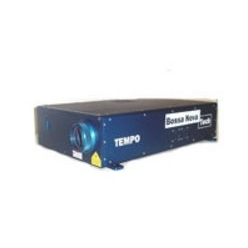



(1)有効ストローク:X軸(左右):600mm、Y軸(前後):300mm、Z軸(上下):200mm
(2)駆動方式:パルスモータ、タイミングベルト
(3)位置繰り返し精度:±0.1mm
(4)制御速度:1〜300mm/sec
(5)システム入出力:入力:4点 / 出力:3点
(6)プログラム入力:ティーチング入力、またはMDI(数値入力)
(7)プログラム容量:2,000ステップ
(8)電源:AC85〜264V (50/60Hz)
(9)外形寸法:(W)765 × (D)550 × (H)400mm (突起部含まず)
(10)質量:約20kg