


一緒に閲覧されている製品









製品カタログ・資料

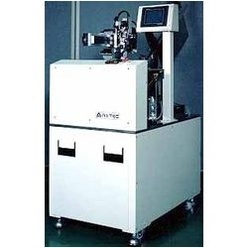
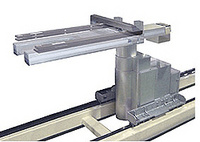
- フレキシブルロボットハンド
ファイル形式:pdf ファイルサイズ:1.08MB本製品は、スライダの配置方向、配置数、間隔をワークに合わせて自由に設定できるフレキシブルロボットハンド。位置決めハンドと吸着パッドの併用により正確な位置への搬送が行える。また搬送物が軽量であれば、吸着せずに把持のみで運ぶことが可能。
フレキシブルロボットハンドのお問い合わせ

その他製品一覧

はんだ付けロボット SOLDER MEI…

産業用ロボット MELFA RV-2SQ

クレイモデル切削ロボット PA-10

台車型ロボットプラットフォーム

デスクトップロボット JR2000N…

第8世代液晶ガラス基板搬送ロボ…
異形部品挿入機(複合電子部品挿…

真空搬送ロボット COVOT

探査ロボット エニーS90

ヒューマノイド・ロボットハンド…
防滴対応単軸ロボット ISWA/IS…

水平多関節ロボット IX-NNCシリ…

水平多関節ロボット MELFAシリ…

垂直多関節ロボット RV-12S/12…

高速ピッキングロボット Para R…

高速スカラ型ロボット THシリー…

第6世代ガラス基板搬送ロボット…

クリーンルームロボット KR 16-…
ガラス基板搬送ロボット CR-J12…