


一緒に閲覧されている製品




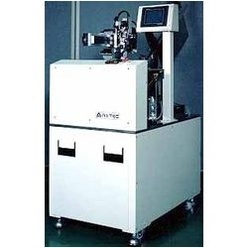




ガラスモールドレンズ非接触挿入・取り出し装置のお問い合わせ

その他製品一覧

ロボットホルダー iCAT

クレイモデル切削ロボット PA-10

半田付けロボット PSU-500

第6世代ガラス基板搬送ロボット…

産業用ロボット KR 30-3

産業用ロボット MELFA RV-2SQ
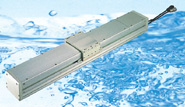
防滴対応単軸ロボット ISWA/IS…

全自動はんだ付けロボット LET…

垂直多関節ロボット RV-12S/12…
ガラス基板搬送ロボット CR-J12…

ヒューマノイド・ロボットハンド…

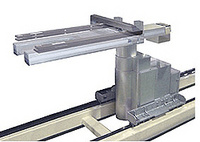
水平多関節ロボット IX-NNCシリ…

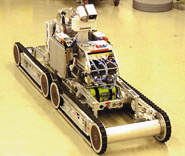
台車型ロボットプラットフォーム

デスクトップロボット JR2000N…

全方位移動ロボット iWs12

高速ピッキングロボット Para R…

真空搬送ロボット COVOT

水平多関節ロボット MELFAシリ…

クリーンルームロボット KR 16-…










(1)ケースより取り出し位置決め冶具に移裁する工程
(2)位置決めされたプリフォームをプレス金型に挿入する工程
(3)成形されたガラスモールドレンズをプレス金型より取り出す工程