
3Dロボットピッキングシステム
最終更新日:2016/03/31
このページを印刷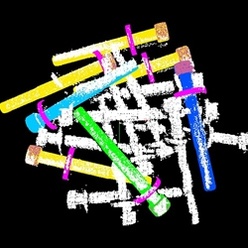
3次元形状認識
本製品は、山積み状態の部品から個々の部品を画像認識し、重心位置と法線ベクトルを算出するシステム。定型品の場合には、モデルデータとのマッチングを行い認識する方法や表面積を認識させる面フィッティング、物体の外形の輪郭から個体を認識させる手法、不定形物の大まかな重心座標取得する方法など、ピッキング対象物やタクトタイムなどの条件を加味したさまざまな認識方法とシステム構成を提案。

一緒に閲覧されている製品




](/upload/company_8805/products/61610/61610_1.jpg)




3Dロボットピッキングシステムのお問い合わせ