
ロボットハンド D-Hand
最終更新日:2015/05/19
このページを印刷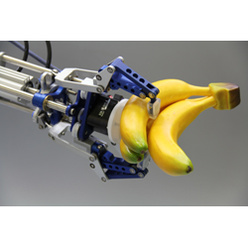
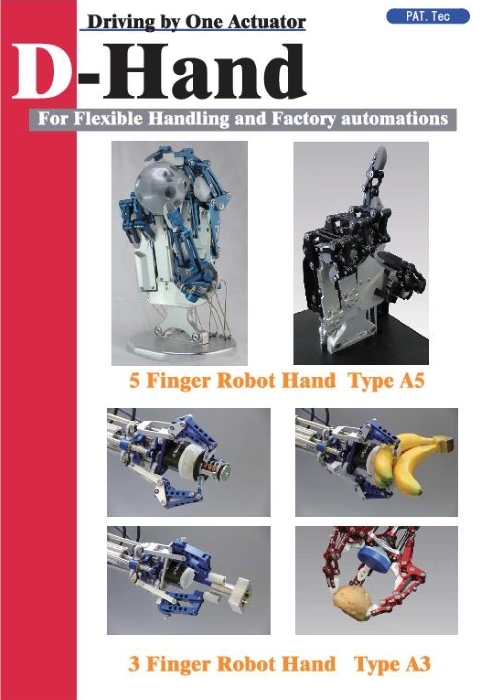
1個のアクチュエーターで保持動作が可能
【D-Hand】は、「やじろべえ式」のリンク機構を持つアクチュエーター駆動のロボットハンド。このリンク機構と各指の4節リンク機構により、各関節への力を自動調節し均等な把持力で安定した把持を実現する。主に自動車関連部品をはじめ、工業製品(金属部品・非鉄金属)、食品類の搬送など、多品種・多形状生産におけるツールチェンジを大幅に削減するマルチロボットハンドとして使用できる。3指タイプのTypeA3HとTypeA3M、各種・空圧駆動とサーボモーター駆動の4タイプをラインアップ。TypeA3H/Mは1指3関節/2関節/平行把持の3種類のフィンガータイプを選択可能。またTypeA3Mは、把持姿勢や対象物の周辺のクリアランスに応じて、サーボモーターで3指の取付配列角度を電動で可変できる。標準品以外にも特注仕様での対応、各社アームロボット、画像システムとの組合せなど、生産システムの提案にも対応している。

一緒に閲覧されている製品










製品カタログ・資料
- ロボットハンド D-Hand
ファイル形式:pdf ファイルサイズ:2.2MB【D-Hand】は、「やじろべえ式」のリンク機構を持つアクチュエーター駆動のロボットハンド。このリンク機構と各指の4節リンク機構により、各関節への力を自動調節し均等な把持力で安定した把持を実現する。主に自動車関連部品をはじめ、工業製品(金属部品・非鉄金属)、食品類の搬送など、多品種・多形状生産におけるツールチェンジを大幅に削減するマルチロボットハンドとして使用できる。3指タイプのTypeA3HとTypeA3M、各種・空圧駆動とサーボモーター駆動の4タイプをラインアップ。TypeA3H/Mは1指3関節/2関節/平行把持の3種類のフィンガータイプを選択可能。またTypeA3Mは、把持姿勢や対象物の周辺のクリアランスに応じて、サーボモーターで3指の取付配列角度を電動で可変できる。標準品以外にも特注仕様での対応、各社アームロボット、画像システムとの組合せなど、生産システムの提案にも対応している。
ロボットハンド D-Handのお問い合わせ

その他製品一覧

汎用二輪移動ロボット iWs09

水平多関節ロボット IX-NNCシリ…
異形部品挿入機(複合電子部品挿…

全自動はんだ付けロボット LET…
遠隔点検ロボット

真空搬送ロボット COVOT

高速スカラ型ロボット THシリー…

産業用ロボット MELFA RV-2SQ

全方位移動ロボット iWs12
防滴対応単軸ロボット ISWA/IS…

高速ピッキングロボット Para R…

高速スカラロボット TH450

第8世代液晶ガラス基板搬送ロボ…

クレイモデル切削ロボット PA-10
ガラス基板搬送ロボット CR-J12…

クリーンルームロボット KR 16-…

水平多関節ロボット MELFAシリ…

第6世代ガラス基板搬送ロボット…

垂直多関節ロボット RV-12S/12…